What is an inertial navigation system?
Drones, satellites, and autonomous vehicles rely on Inertial Navigation Systems (INS) to operate autonomously or with minimal human input. These systems use motion sensors to estimate an object's position, orientation, and velocity without external references like GPS or landmarks.
A key component of a robust INS is sensor fusion, which combines data from multiple complementary sensors to provide more accurate and reliable information.
How is it built?
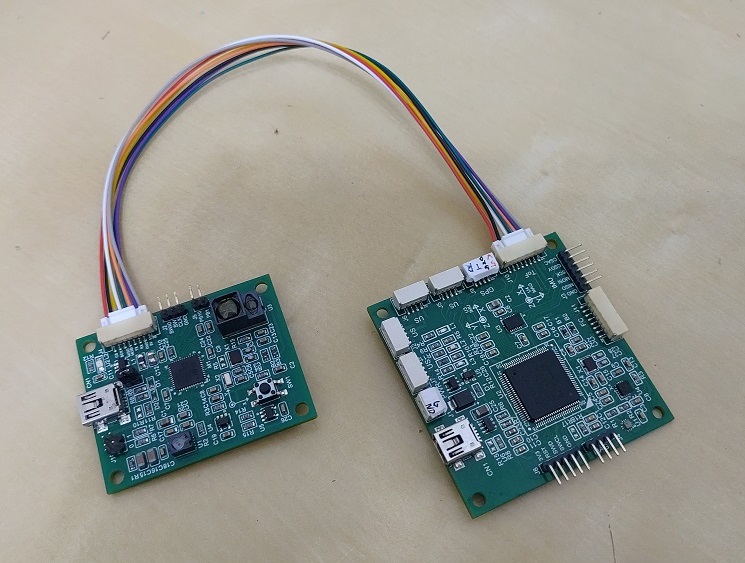
In my recent project, I developed an INS for drones, integrating sensors such as a gyroscope, accelerometer, magnetometer, optical flowmeter, time-of-flight camera, and barometer.
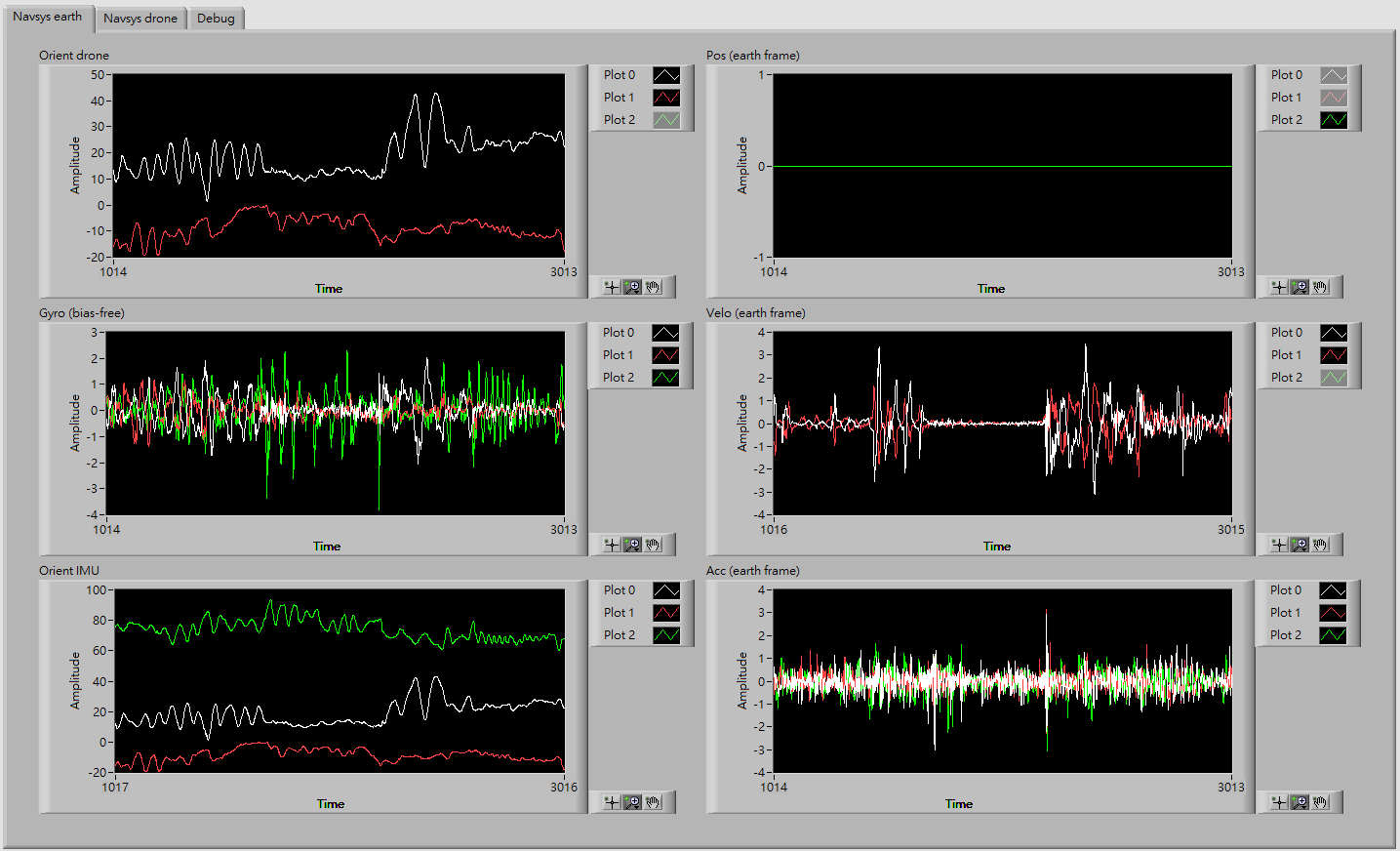
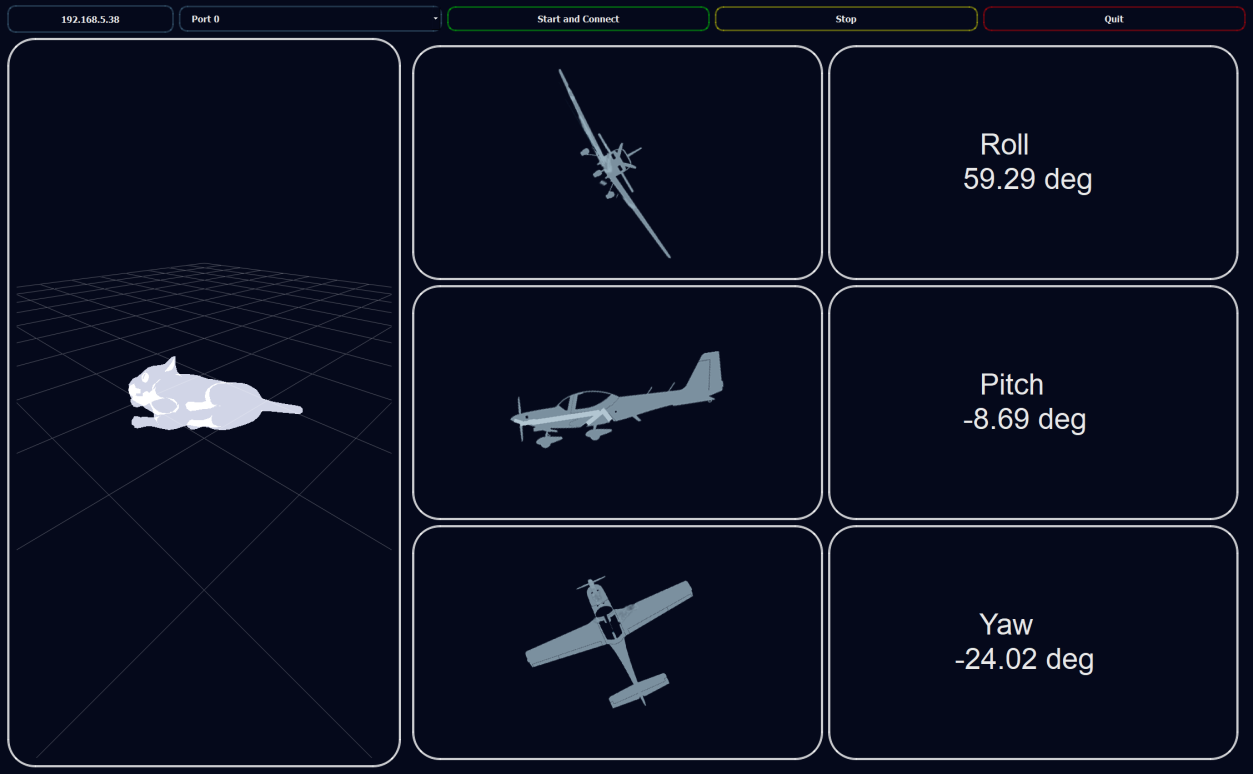
I handled the real-time system dealing with timely data acquisitions. A Kalman filter-based sensor fusion has been implemented to enhance performance. The fused data are then quickly fed back to the flight controller. Overall, the system achieves an update rate of 400 Hz.